ربات ها نحوهی بینایی ماشینی صحیح و کامل را میآموزند [تماشا کنید]

اکنون بینایی ماشینی در وضعیت مطلوبی به سر میبرد. در حال حاضر ربات ها میتوانند بر اساس اپلیکیشن طراحی شده برای آنها، قسمتهای محدودی از محیط پیرامون را مشاهده کنند.
این مسئله موجب میشود ربات ها بتوانند یک شئ به خصوص را از محلی مشخص بردارند و آن را در جای دیگری قرار دهند. با اینکه این روش برای تکرار یک روند خاص کافی است اما برای آنکه بتوان از رباتهای هوشمند در مسائل مختلف متفاوت با استفادهی صنعتی کمک گرفت، باید آنها نحوهی بینایی ماشینی صحیح را یاد بگیرند تا قادر باشند با بررسی شواهد محدود عملکرد درستی را در پیش بگیرند.
حال محققان مؤسسه فناوری ماساچوست (MIT) سیستمی به نام DON طراحی کردهاند که می تواند شرایطی فراهم کند تا رباتها بتوانند نحوهی بینایی صحیح را خودشان بیاموزند.
سیستم DON (بر گرفته از سر واژههای Dense Object Nets به معنی شبکههای اشیاء متراکم) در واقع صورت جدیدی از بینایی ماشینی است که توسط محققان آزمایشگاه هوش مصنوعی و علوم کامپیوتری MIT توسعه یافته است.
این سیستم با جمع آوری اطلاعات دیداری و مرتب کردن نقاط مهم موجود، یک نقشهی بصری تولید میکند. سپس با استفاده از مختصات بدست آمده تمامی نقاط موجود و ترکیب آنها با یکدیگر، مجموعه مختصات کاملی را فراهم می آورد.
روند شکل گیری این نقشههای دیداری، بسیار شبیه مواقعی است که ترکیب چند عکس با یکدیگر، یک عکس پاناروما بزرگ را نتیجه میدهد.
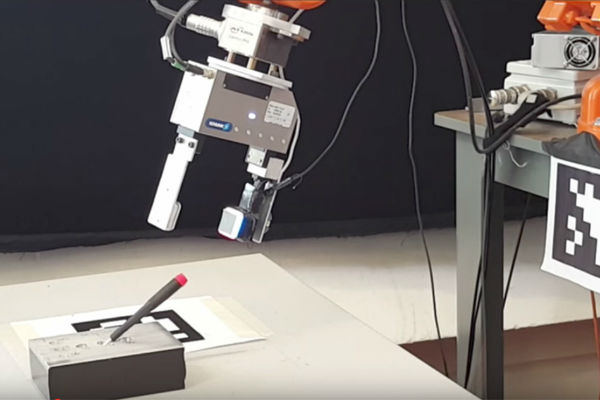
این سیستم موجب میشود که رباتها بتوانند شکل اشیاء یا محل جاگیری آنها را بهتر تشخیص داده و بتوانند درک درستی از محیط پیرامونشان داشته باشند.
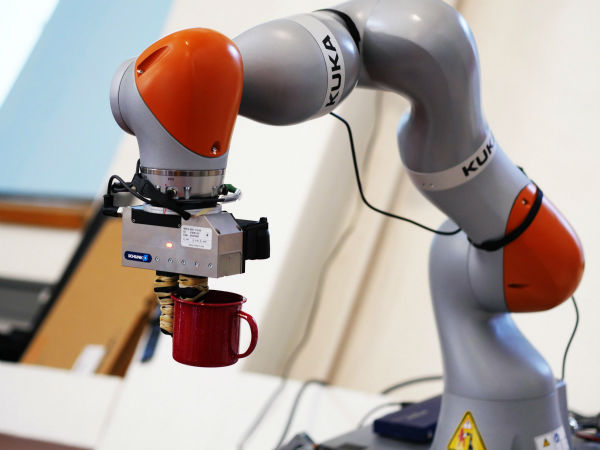
برای مثال رباتهای بهره مند از سیستم DON میتوانند با نگاه کردن به یک فنجان قهوه یا کفش، بهترین مکان برای گرفتن آنها را پیدا کرده و بدون آنکه کفش را خراب کرده یا قهوه را بریزند، آنها را جابجا کنند.
البته هنوز این تکنولوژی در ابتدای راه قرار دارد و احتمالاً در آیندهای نزدیک، رباتهایی را مشاهده خواهیم کرد که میتوانند به دقت محیط را مشاهده کرده و به جمع آوری وسایل منزل بپردازند.
The post ربات ها نحوهی بینایی ماشینی صحیح و کامل را میآموزند [تماشا کنید] appeared first on دیجیاتو.


